無人機城市環境最佳航線規劃系統(避障 / 3D)
系統摘要 (System Overview)
本系統設計目的是一個無人機任務規劃(Mission Planning)數位驗證系統,核心價值在於將複雜的城市地理限制、法規與安全避障規則「參數化」。透過 3D 模擬環境,將航線規劃轉化為「可數據化、可重現」的標準作業流程(SOP),協助團隊在任務前期即完成風險前置檢核,極大化營運安全性並降低試飛成本。將「障礙物模型、禁航區規範、安全緩衝距離、飛行高度策略」納入同一套規劃流程,輸出可重現、可比較的航線結果,協助在部署前完成風險評估與策略選型。
核心功能 (Core Features)
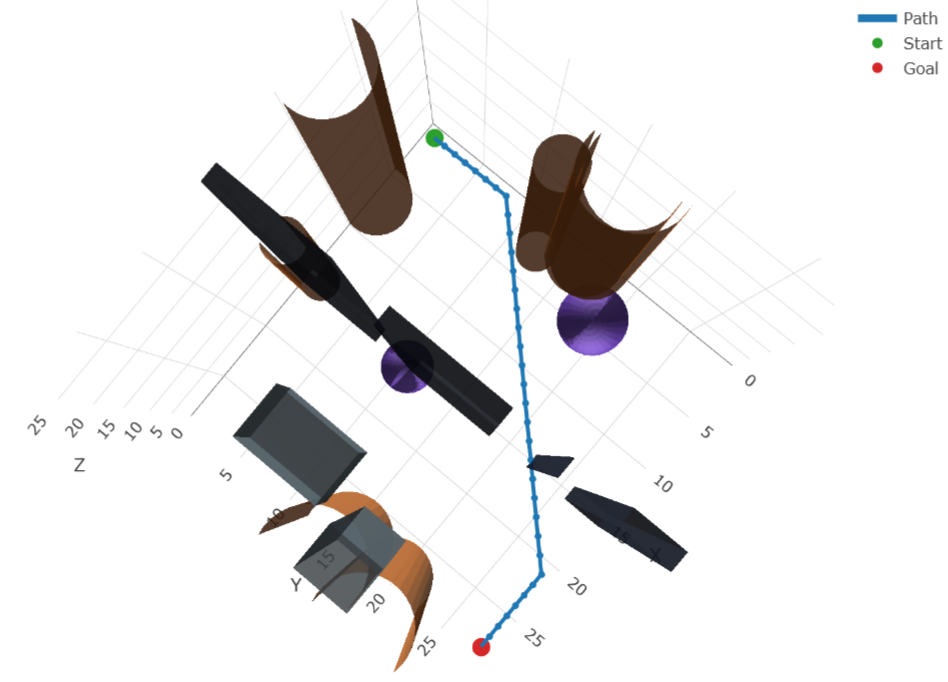
- 3D 避障航線規劃: 支援多類型障礙物(例如建築物量體、圓柱/球形障礙、動線緩衝區),輸出可執行的 3D 路徑。
- 禁航區與安全規則約束: 規劃過程中自動避開禁航/限航區,並納入最小安全距離與高度限制,降低違規與碰撞事件。
- 策略偏好與方案比較: 可設定「低空/高空」、「貼邊/外圍」、「最短距離/更高安全裕度」等偏好,產生可比較方案以支援任務決策。
- 可視化與可追溯: 以 3D 視覺化呈現路徑與障礙關係,利於向主管/客戶說明規劃依據,並保留參數以重現同條航線結果。
產業應用 (Industry Applications)
- 城市巡檢與設施盤點(Urban Inspection): 針對橋梁、道路、建築外牆、工地或公共設施巡檢,在任務前完成路徑可行性與安全緩衝驗證。
- 物流/點對點配送航線評估(Urban Delivery Pre-check): 對高密度建物環境建立避障路徑,降低實際飛行中因臨時繞行造成的延誤與風險。
- 公共安全與緊急應變(Public Safety & Emergency Response): 在限制條件多、時間壓力高的情境下,快速產生合規航線,支援搜索、現場回傳與事件記錄。
- 飛行規範/營運規則驗證(Compliance & Ops Validation): 將禁航區、限高、緩衝距離等規則前置到規劃階段,作為 SOP 與風險控管的一部分,提升可稽核性。