無人機山林地形最佳航線規劃系統(多重約束 / 3D)
系統摘要 (System Overview)
本系統設計目的是一個無人機任務規劃(Mission Planning)數位驗證系統,核心價值在於將地形、障礙物、禁航區域(虛擬牆)與飛行安全高度等維度「參數化」,構建一套可視化、可重現且具備風險預檢能力的決策平台。這能協助營運團隊在實機出勤前,精確評估航線可行性並降低繞航成本與風險。
核心功能
- 多重約束航線規劃:同時納入地形高度、障礙區/禁航限制與安全高度等條件,輸出可行航線。
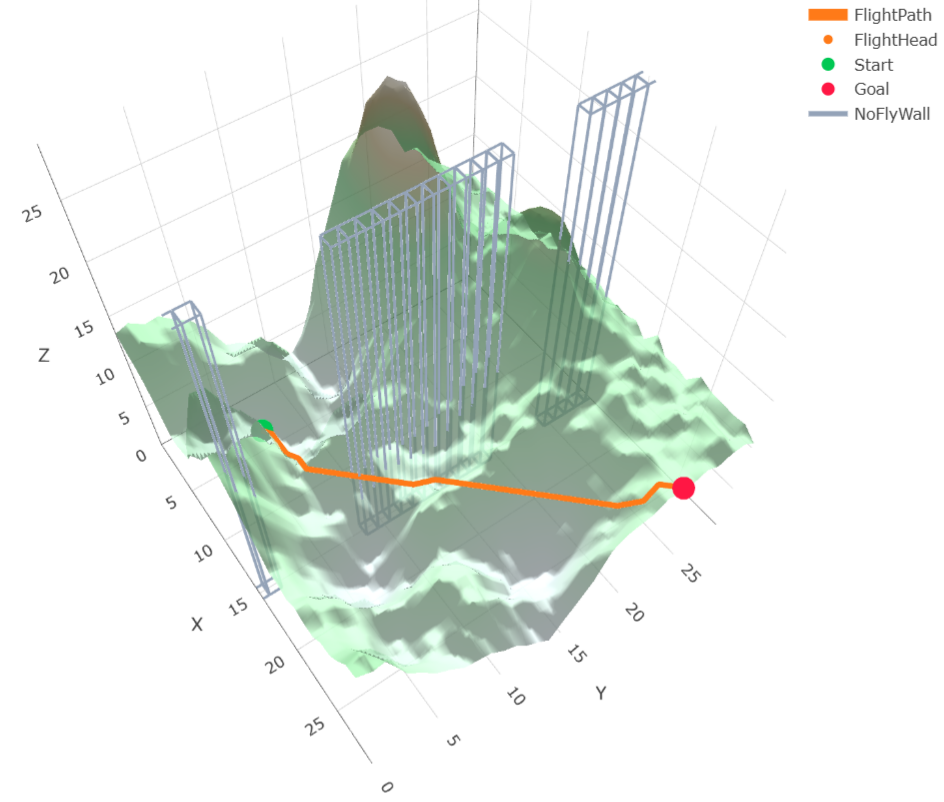
- 3D 可視化與風險檢視:以 3D 圖形呈現地形、禁航限制與航線,利於任務前規劃與溝通。
- 航線成本與可行性評估:可依據距離/高度變化/風險區域穿越等指標作為成本函數,便於策略比較。
- 規劃結果可追溯:保留起點/終點、約束條件與求解結果,作為任務規劃與回溯分析的依據。
適用情境
- 高風險區域巡檢與應急救援 (High-Risk Inspection & SAR):針對電力塔、林道及山區搜救,在複雜地形中預先排除遮蔽與訊號死角,極小化資產損耗與人員風險。
- 精準地形跟隨與測繪 (Precision Terrain Following & Mapping):於高低落差巨大的地理環境中,自動維持安全對地高度,確保影像重疊率與資料精確度,提升大規模建模之效率。
- 敏捷防災部署與模擬演練 (Disaster Responding & Drills):在颱風、土石流等極端情境發生時,快速生成受災區避障航線,作為應變指揮中心下達決策的重要參考。
- 無人機營運風險管控與模擬測試 (Fleet Risk Management & Simulation):在實機交付或外場試飛前,於數位環境中驗證避障邏輯與合規限制,大幅降低硬體損壞成本與合規性風險。